Метод телевизионной лазерной локации
- Информация о материале
- Категория: Определение пространственной формы искусственных космических объектов методом телевизионной лазерной локации
- Опубликовано: 11.10.2019 17:25
- Автор: Павел Варгин
Метод телевизионной лазерной локации (ТВЛЛ), разработанный в Научно-исследовательском институте телевидения (Россия) [5], позволяет получить карту глубины удаленного объекта наблюдения за двойное время пролета одного импульса света от точки наблюдения до объекта. Разрешение по углу изображения карты глубины при этом ограничено лишь разрешением телевизионного (фото) датчика, а разрешение по глубине для объектов типа ИКО единицами сантиметров. По сравнению с другими активными (лазерными) методами определения пространственной формы объектов метод ТВЛЛ обладает уникальным сочетанием высокой угловой разрешающей способности телевизионной (фото) системы и быстродействием со временем экспозиции в десятки наносекунд.
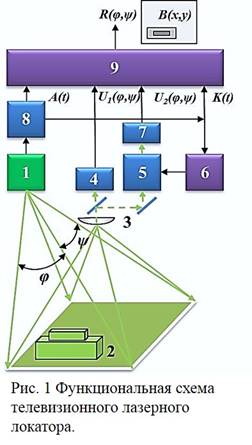
На рис. 1 приведена функциональная схема телевизионного лазерного локатора (ТВЛЛ). Источник света 1 широким пучком подсвечивает поверхность 2 трехмерного объекта короткими импульсами излучения. Отраженное от поверхности излучение поступает через оптическую систему 3, состоящую из объектива и разделяющей поток излучения пары зеркал, на два фотодатчика (приемника излучения). Датчик 4, например, ПЗС (КМОП) матрица формирует на своем выходе пропорционально экспозиции излучения, прошедшего через полупрозрачное зеркало, на каждый из ее сенселей, обычное изображение объекта. Другой датчик 5, например, электронно-оптический преобразователь (ЭОП), используя излучение, отраженное от пары зеркал, также формирует на своем выходе (экране) изображение. Однако изображение на экране ЭОП необычное, поскольку во время прихода отраженного от объекта излучения ЭОП быстро меняет (модулирует) свое усиление при воздействии сигнала блока управления6. Например, при линейном увеличении усиления ЭОП в процессе приема излучения дальние точки однородно окрашенной поверхности объекта на экране ЭОП будут выглядеть более яркими по сравнению с ближними, поскольку импульс света от них приходит позже, когда усиление ЭОП уже сильно увеличилось. Необычность изображения на экране ЭОП обусловлена одновременным воздействием двух факторов на его формирование: тона раскраски и рельефа поверхности объекта наблюдения. Яркость элемента изображения определяется как коэффициентом отражения импульса света от элемента поверхности объекта, так и запаздыванием прихода этого импульса на приемник пропорционально удаленности элемента поверхности. Подчеркнем, что запаздывание влияет на яркость элемента изображения в основном из-за модуляции усиления ЭОП и незначительно из-за уменьшения энергии света приходящего на приемник пропорционально квадрату расстояния до элемента объекта. Изображение с экрана ЭОП репродуцируется сочлененным с ним фотодатчиком 7, например, ПЗС (КМОП) матрицей, обеспечивающей его последующую развертку. Момент излучения импульса света источника подсветки фиксируется специальным быстродействующим одноэлементным фотодатчиком 8, сигнал которого запускает счетчик времени задержки начала формирования сигнала модуляции ЭОП. Система формирования карты глубины рельефа поверхности объекта наблюдения 9 обеспечивает поэлементное вычисление отношения сигналов соответствующих элементов (сенселей) фотодатчиков 7 и 4. Полученная матрица отношений с учетом формы импульсов излучения подсветки и закона модуляции усиления ЭОП служит основой для формирования карты глубины – B(x,y) удаленного объекта наблюдения.
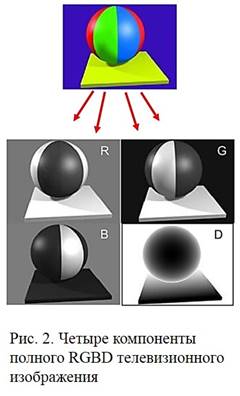
С использованием ТВЛЛ появляется возможность синтеза цветного объемного изображения объекта наблюдения. При этом исходная информация о цвете элементов объекта кодируется как обычно тремя R (красная), G (зеленая) и B (синяя) компонентами полного изображения, а информация о дальности этих элементов дополнительной компонентой дальности – D [6]. D-компоненту в литературе по обработке изображений принято называть картой глубины. Полное четырехкомпонентное RGBD изображение, приведенное на рис. 2, может быть воспроизведено на четырех одноцветных мониторах или на одном цветном стереоскопическом для его визуального анализа. Для быстрой идентификации объектов наблюдения следует использовать автоматическое распознавание их образов в виде R, G, B и D компонент.
Метод ТВЛЛ может использоваться для получения телевизионного изображения карт глубины с частотой кадров, например, 50 Гц или отдельных карт глубины объектов без создания видеопотока. В качестве импульсных источников света для освещения ИКО удобно использовать лазеры.
Приведем математическое описание метода телевизионной лазерной локации. Сигнал датчика 4 (рис. 1) можно представить выражением:
![]()
![]() (1)
(1)
где:![]() – горизонтальная, а
– горизонтальная, а![]() – вертикальная угловые координаты точки поверхности трехмерного объекта (начало координат, излучатель и фотодатчик находятся в одной точке пространства), M – постоянная определяемая в частности параметрами оптической системы ТВЛЛ, I (
– вертикальная угловые координаты точки поверхности трехмерного объекта (начало координат, излучатель и фотодатчик находятся в одной точке пространства), M – постоянная определяемая в частности параметрами оптической системы ТВЛЛ, I (![]() ) – угловое распределение интенсивности лазерного излучения, ρ(x, y) – распределение коэффициента отражения поверхности объекта, r (
) – угловое распределение интенсивности лазерного излучения, ρ(x, y) – распределение коэффициента отражения поверхности объекта, r (![]() ) – координата дальности точки поверхности объекта, f[r2(φ, ψ)] – функция, учета зависимости освещенности объекта от расстояния до него, A(t) – форма импульса лазерного излучения; t – время, с – скорость распространения лазерного излучения. Пределы интегрирования: t1 и t2 взяты с учетом конечности длительности импульса лазерного излучения и расстояния до объекта наблюдения.
) – координата дальности точки поверхности объекта, f[r2(φ, ψ)] – функция, учета зависимости освещенности объекта от расстояния до него, A(t) – форма импульса лазерного излучения; t – время, с – скорость распространения лазерного излучения. Пределы интегрирования: t1 и t2 взяты с учетом конечности длительности импульса лазерного излучения и расстояния до объекта наблюдения.
При условии нормировки (надлежащем выборе значения постоянной – М):
![]() , (2)
, (2)
При этом:
![]() , (3)
, (3)
Сигнал датчика 7 (рис. 1) можно представить выражением:
![]() , (4)
, (4)
где ![]() – выбранный закон модуляции ЭОП.
– выбранный закон модуляции ЭОП.
С учетом выражений (1) и (4) отношение сигналов фотодатчиков 7 и 4 определяется равенством:
![]() (5)
(5)
Если K(t) и А(t) выбраны так, что правая часть этого равенства взаимно-однозначная функция от r(φ, ψ)на выбранном интервале дальности, то и ![]() – взаимно-однозначная функция дальности на данном интервале дальностей. При этом можно однозначно определить пространственную форму удаленного объекта:
– взаимно-однозначная функция дальности на данном интервале дальностей. При этом можно однозначно определить пространственную форму удаленного объекта:
![]() . (6)
. (6)
где: r0 – дальность до ближайшей точки объекта. Определить значение r0 можно различными способами, обсуждение которых выходит за рамки настоящей статьи.
Приведенное ограничение на выбор функций K(t) и А(t) допускает большое разнообразие вариантов их возможного выбора. Рассмотрим некоторые из этих вариантов.