
Однозональный вариант ТВЛЛ
- Информация о материале
- Категория: Определение пространственной формы искусственных космических объектов методом телевизионной лазерной локации
- Опубликовано: 11.10.2019 17:26
- Автор: Павел Варгин
При предельно малой длительности, но конечной энергии импульса излучения лазера его форму можно представить функцией Дирака – ![]() . Выберем линейный закон модуляции усиления ЭОП –
. Выберем линейный закон модуляции усиления ЭОП –![]() , тогда, подставляя эти значения в выражение (5) и используя фильтрующее свойство δ – функции, получим:
, тогда, подставляя эти значения в выражение (5) и используя фильтрующее свойство δ – функции, получим:
![]() , (7)
, (7)
где: a – постоянная.
При этом пространственная форма объекта определяется простым выражением:
![]() (8)
(8)
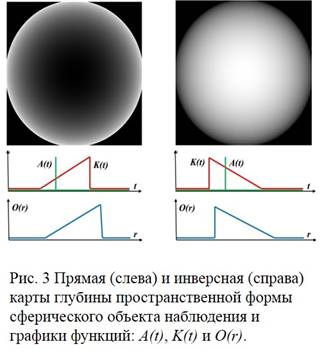
На рис. 3 приведены прямая и инверсная карты глубины объекта наблюдения со сферической формой поверхности, при этом под каждой из них приведены соответствующие формы: светового импульса, сигнала модуляции и сигнала отношения O(r). Карта глубины представляет собой изображение, яркость которого:
![]() , (9)
, (9)
где: x = ηφ и y = ηψ, а β и η – постоянные.
Инверсную карту глубины можно определить выражением:
![]() , (10)
, (10)
где:![]() – максимальное значение
– максимальное значение ![]() .
.
Важной характеристикой ТВЛЛ является его разрешающая способность. Угловая разрешающая способность ТВЛЛ определяется разрешающей способностью его телевизионных фотодатчиков. Разрешающая способность ТВЛЛ по глубине в основном определяется уровнем шумов этих фотодатчиков, который, в свою очередь, определяются значением дисперсии их фотонных или дробовых (для ЭОП) шумов.
Приведем оценку разрешающей способности ТВЛЛ по глубине с учетом фотонных шумов. Известно, что фотонные шумы описываются статистикой Пуассона, которая при достаточно большом числе фотонов хорошо аппроксимируется статистикой Гаусса. При этом дисперсия нормального закона распределения определяется равенством ![]() , где n – среднее число фотонов (математическое ожидание распределения), приходящихся на сенсель фотодатчика к концу цикла накопления, при его заданной постоянной засветке. Выберем шкалу квантования фотосигнала сенселя с шагом
, где n – среднее число фотонов (математическое ожидание распределения), приходящихся на сенсель фотодатчика к концу цикла накопления, при его заданной постоянной засветке. Выберем шкалу квантования фотосигнала сенселя с шагом ![]() , при матожидании
, при матожидании ![]() приходящимся на середину шага между уровнями к и к+1. Вероятность нахождения фотосигнала между этими уровнями, например, при
приходящимся на середину шага между уровнями к и к+1. Вероятность нахождения фотосигнала между этими уровнями, например, при ![]() равна 0,683, а при
равна 0,683, а при ![]() равна 0,954 и может быть получена при численном расчете для любого значения а. При условии равенства вероятностей нахождения фотосигнала между указанными уровнями, при любом к, шкала квантования является нелинейной.
равна 0,954 и может быть получена при численном расчете для любого значения а. При условии равенства вероятностей нахождения фотосигнала между указанными уровнями, при любом к, шкала квантования является нелинейной.
Значение величины к – того уровня шкалы в фотонах определяется выражением:
![]() . (11)
. (11)
Максимальное число уровней такой шкалы (элементов разрешения по глубине) – ![]() определяется заданием максимального значения числа фотонов на сенсель фотодатчика –
определяется заданием максимального значения числа фотонов на сенсель фотодатчика – ![]() и постоянной – а с помощью выражения:
и постоянной – а с помощью выражения:
![]() . (12)
. (12)
Например, для ![]() и 1000 фотонов на сенсель
и 1000 фотонов на сенсель ![]() , для 10000 фотонов на сенсель
, для 10000 фотонов на сенсель ![]() .
.
Число элементов разрешения по глубине, согласно выражению (11) приходится на всю зону по глубине, определяемую длительностью сигнала модуляции ТВЛЛ, такого как приведенный на графиках рис. 3. Последнее означает, что для увеличения числа элементов разрешения по глубине поверхности объекта наблюдения следует максимально сужать размер зоны наблюдения по глубине, уменьшая длительность сигнала модуляции, но сохраняя его размах для максимально возможного отношения видеосигналов фотодатчиков – O(r).