
Наведение луча освещения объекта
- Информация о материале
- Категория: Определение пространственной формы искусственных космических объектов методом телевизионной лазерной локации
- Опубликовано: 11.10.2019 17:28
- Автор: Павел Варгин
Мало сформировать ширину луча подсветки с учетом дальности до объекта наблюдения, необходимо быстро и правильно навести луч на объект. Оптимальной представляется трехконтурная система наведения луча, показанная на рис. 7.
В качестве первого контура управления наведением можно использовать наземную систему наблюдения за космическим пространством в сочетании с системой ориентации космического аппарата – платформы установки средств инспекции ИКО. Задача этого контура состоит в том, чтобы обеспечить наведение на объект широкоугольной телевизионной камеры, установленной на платформе, как путем наведения телекамеры, так и ориентации самой платформы.
Во второй контур входит указанная широкоугольная телекамера и система управления наведением телевизионного лазерного локатора (ТВЛЛ), оснащенного узкоугольным варифокальным объективом. Задача этого контура состоит в том, чтобы обеспечить наведение на объект одного из фотодатчиков ТВЛЛ, работающего в пассивном режиме малой чувствительности при солнечной подсветке объекта и адаптировать его с помощью варифокального объектива к наблюдению ИКО в необходимом масштабе.
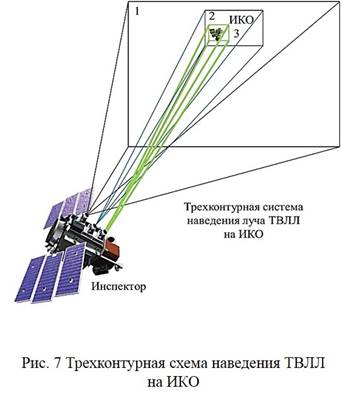
Третий контур управления – самый быстрый, поскольку оперирует устройством наведения луча ТВЛЛ предельно малой массы. В этот контур входит фотодатчик ТВЛЛ в пассивном режиме и устройство наведения луча ТВЛЛ. Задача этого контура состоит в наведении центральной оси луча подсветки ТВЛЛ на ИКО.
Все контуры управления могут предусматривать либо участие в них оператора, либо наличие в них автоматических систем распознавания образов целей наведения, либо того и другого одновременно. Телевизионная информация всех контуров управления, при наличии автоматических систем распознавания образов целей наведения, позволяет осуществлять не только предварительное наведение ТВЛЛ на ИКО, но и непрерывно отслеживать ИКО в условиях его перемещения относительно инспектора, после захвата ИКО на сопровождение по заданному алгоритму.